在工业控制现场,不同设备的串口(如 RS485、RS232)波特率不统一是常遇到的头疼问题 —— 主控板或 PLC 要统一控制这些设备,必须保证波特率一致。可有些设备能手动设置波特率,有些却固定死,没法调整。
基于这个痛点,我从 2018 年开始研发数据双向透传的波特率转换器,经过反复测试改进,第一代产品就稳定落地,至今已在几十个工业项目中应用。今天就把 PIC 单片机实现波特率转换的核心逻辑、特殊波特率实现技巧、抗干扰电路设计讲透,新手也能参考落地。
一、核心方案:PIC 单片机选型与硬件设计
波特率转换的关键是 “双 UART + 稳定硬件”,既要满足常用波特率转换需求,也要适配工业现场的抗干扰要求。
1. 单片机选型:按波特率需求选型号
- 常规需求( ≤1Mbps ):首选 PIC16F1947,自带两个 UART 接口,最高主频可达 32MHz,完全覆盖 2400、9600、115200 等常用波特率,性价比高,是工业场景的主力选型;
- 高速需求(> 1Mbps ):比如要实现 4.8M、5Mbps 波特率转换,建议选 PIC32MX 系列,主频调节范围更广(支持 30M、50M、75M、80M 等),能满足高速波特率的时序要求。
2. 硬件电路:RS232+RS485 双接口设计(工业级稳定)
电路核心是 “双接口共用 CPU RX 脚”,同时强化抗干扰设计,具体电路如下(关键元件已标注):
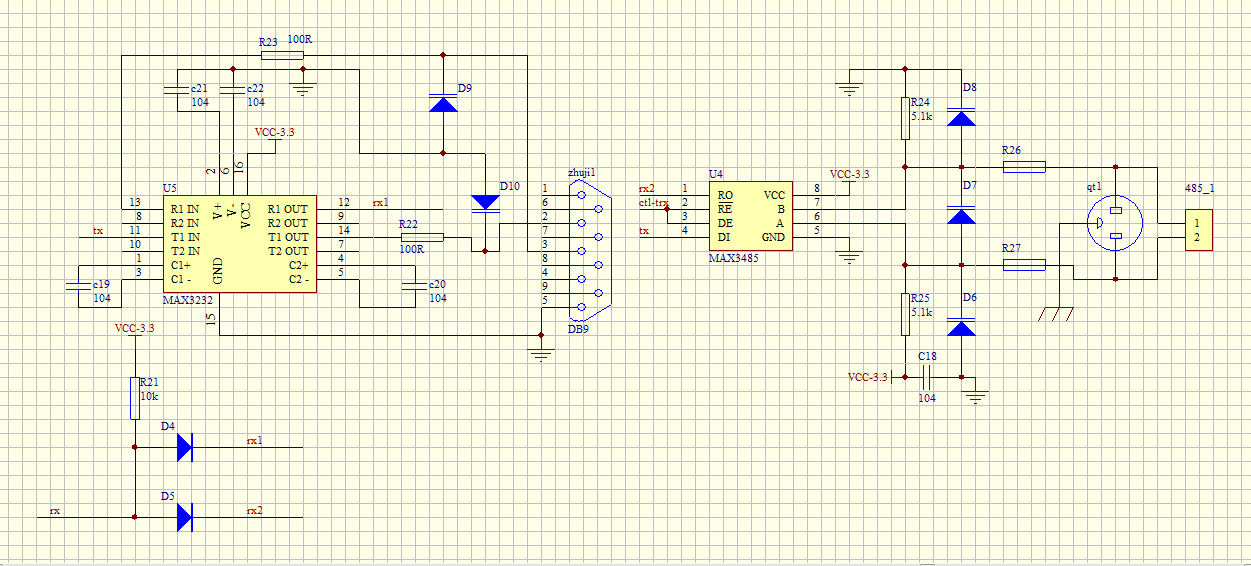
关键设计要点(新手必看):
- 接口复用技巧:RS232 和 RS485 共用 CPU 的 RX 脚,通过 1N5819 肖特基二极管(D4、D5)+10K 上拉电阻(R21)实现,无需额外占用 IO 口,简化硬件结构;
- 核心芯片选型:RS232 用 MAX3232 芯片,RS485 用 MAX3485 芯片,供电需与单片机一致(3.3V),避免电平不匹配导致通信失败;
- 限流与防护:RXD、TXD 引脚串联 100Ω 电阻(R23、R27),防止电流过大烧毁芯片;保留 RS485 的三重防护(气体放电管 qt1、TVS 管 D6 等),应对工业现场浪涌、电磁干扰;
- 元件参数参考:具体电阻、电容选型可参考我之前的《深入解析 RS-232、RS-485 和 RS-422 总线与实战防护电路》一文。
3. 必备抗干扰电路:RC 滤波 + 接地设计
工业现场电磁干扰强,单独加一个简单的 RC 电路就能大幅提升稳定性,这是我实测有效的 “低成本抗干扰技巧”:
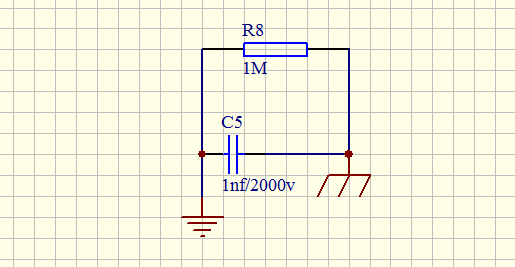
电路细节:
- 由电阻 R8(1M-10MΩ)和电容 C5(1nF/2000V)并联组成,一端接电源 GND,另一端接大地;
- 电阻对低频干扰起抑制作用,电容对高频干扰(如电磁辐射)起滤波作用,耐压 2000V 以上的电容能应对突发浪涌,避免击穿损坏核心芯片。
二、波特率转换核心:公式 + 实战案例(含特殊波特率)
波特率转换的本质是 “通过单片机主频和寄存器配置,实现不同波特率的收发适配”,核心公式和实战案例如下,直接套用即可。
1. 核心公式:波特率与主频的关系
波特率计算遵循公式:baud = Fosc / [4×(n+1)]
- Fosc:单片机主频(如 15M、32M、76.8M、80M等);
- n:波特率寄存器配置值;
- 常用波特率(2400、9600、115200等)计算时,n 的小数部分可四舍五入;特殊波特率必须保证 n 为整数,否则需调整主频。
2. 实战案例:常用 + 特殊波特率实现
(1)常规波特率转换(PIC16F1947+15M 晶振)
- 需求:187500 波特率 → 115200 波特率;
- 187500 波特率计算:n = (Fosc / (4×baud)) - 1 = (15M / (4×187500)) - 1 = 19(整数,直接配置);
- 115200 波特率计算:n = (15M / (4×115200)) - 1 ≈ 31.55,四舍五入取 32(实测通信稳定,误差在工业允许范围)。
(2)特殊波特率实现(PIC32MX+76.8M 主频)
- 需求:4.8M 波特率转换(高速场景);
- 4.8M 波特率计算:n = (76.8M / (4×4.8M)) - 1 = 3(整数,完美适配);
- 关键:PIC32MX 系列支持更高主频(76.8M),是实现 4.8M、3.125M 等特殊高速波特率的核心,若用 PIC16F 系列则无法满足主频要求。
(3)其他特殊波特率配置参考
| 特殊波特率 | 单片机型号 | 所需主频 | 寄存器配置n值 | 备注 |
|---|---|---|---|---|
| 1.5M | PIC32MX | 30M | 4 | 50M/75M也可 |
| 2.5M | PIC32MX | 50M | 4 | 80M也可 |
| 3.125M | PIC32MX | 75M | 5 | |
| 4.8M | PIC32MX | 76.8M | 3 |
注:所有配置均经过工业现场实测,通信误差≤1%,满足 RS485/RS232 的通信规范。
三、工业级避坑技巧:这些错误别犯!
- 忽略 n 值整数要求:特殊波特率(如 187500、4.8M)必须保证 n 为整数,否则会出现丢包、乱码,优先通过调整主频(而非四舍五入)满足要求;
- 供电电压不稳定:高速波特率(>1Mbps)对供电要求更高,建议在电源端并 100μF胆电容 + 0.1μF 陶瓷电容;
- 未加 RC 抗干扰电路:工业现场即使是常规波特率,不加 RC 滤波也可能因干扰导致通信中断,这个低成本电路一定要加;
- 接口复用未用肖特基二极管:用普通二极管替代 1N5819,会导致信号衰减,甚至无法识别,最好选用肖特基二极管(导通压降低、响应快);
- 晶振选型不当:特殊波特率对晶振精度要求高,建议选用 高精度的外部晶振,避免用单片机内部 RC 振荡器(精度低,易受温度影响)。
你在工业现场遇到过哪些特殊波特率需求?或者波特率转换时遇到过丢包、乱码等问题?欢迎在评论区留言,我会逐一解答!
后续干货不断,咱们一起在单片机的世界里,共同进步。

