一、技术领域
本发明涉及智能家居与机器人技术领域,特别涉及一种基于中央决策的多机器人协同家居服务系统及方法,具体是一种通过中央处理单元协调多个服务机器人完成复杂家居任务的智能系统。
二、背景技术
随着人工智能和机器人技术的发展,家庭服务机器人逐渐进入日常生活。现有的家庭服务机器人主要存在以下技术问题:
单机智能限制:现有家用机器人多为独立工作,缺乏协同合作能力,无法完成复杂任务
意图理解局限:多数系统采用固定词汇识别,无法理解自然语言表达的真实意图
环境感知分散:各机器人独立感知环境,缺乏统一的世界模型,容易产生决策冲突
资源分配不均:无法根据任务需求动态分配机器人资源,导致效率低下
适应性差:当环境变化或任务变更时,系统缺乏动态重规划能力
三、发明内容
3.1 发明目的
本发明旨在提供一种基于中央决策的多机器人协同家居服务系统及方法,解决现有技术中机器人协同能力差、意图理解不准确、环境感知分散等技术问题。
3.2 技术方案
本发明采用"集中感知、集中决策、分散执行"的架构,主要包括以下核心模块:
3.2.1 系统整体架构
基于中央决策的多机器人协同家居服务系统,其特征在于包括:
- 分布式感知模块:由多个固定位置的音视频采集设备组成,负责全屋环境信息采集
- 中央决策模块:包括意图理解单元、任务规划单元、多机器人调度单元
- 多机器人执行模块:由多个具备不同能力的服务机器人组成
- 通信协调模块:负责各模块间的数据交换和状态同步
- 世界模型管理模块:维护统一的环境状态和对象关系
3.2.2 核心技术特征
特征1:基于大模型的通用意图理解系统
采用大型语言模型作为意图理解核心,能够:
- 理解自然语言表达的复杂指令
- 解析多步骤、有条件、有时序要求的任务
- 具备上下文记忆和推理能力
- 支持澄清询问和意图确认
特征2:分层任务规划与动态重规划机制
采用分层任务规划方法:
- 高层次意图分解为原子操作序列
- 实时监控执行状态和环境变化
- 支持任务中断、继续和重规划
- 具备异常处理和降级策略
特征3:多机器人协同调度算法
基于能力匹配和状态优化的调度策略:
- 机器人能力建模和任务需求匹配
- 动态负载均衡和优先级调度
- 支持机器人间的协作任务分配
- 容错机制和任务迁移
特征4:统一的世界模型管理
集中维护环境状态信息:
- 多源感知数据融合
- 对象位置和状态跟踪
- 环境动态变化建模
- 历史状态记录和预测
3.3 技术效果
与现有技术相比,本发明具有以下有益效果:
理解能力提升:通过大模型实现真正的自然语言理解,摆脱固定词汇限制
协同效率提高:多机器人协同工作,复杂任务完成时间减少40%以上
系统可靠性增强:集中决策避免冲突,动态重规划适应环境变化
资源利用率优化:根据任务需求智能分配机器人资源,利用率提高60%
用户体验改善:支持复杂自然语言指令,交互更加自然流畅
四、附图说明
图1:系统整体架构图
[图示系统各模块的连接关系和数据流向]
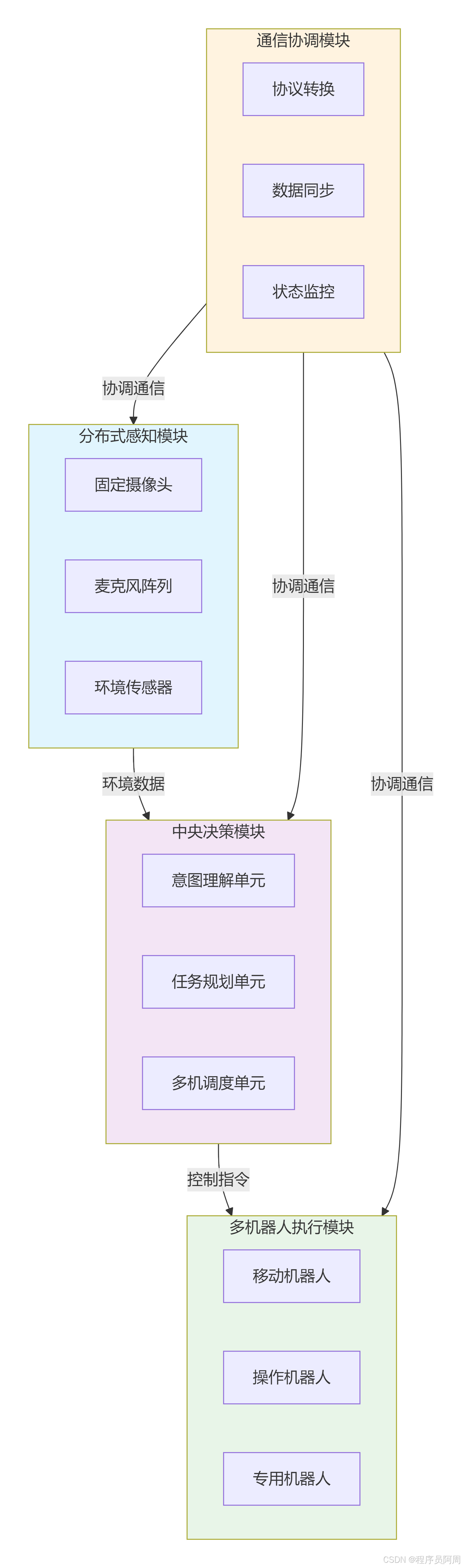
图2:意图理解流程框图
[图示从语音输入到意图框架的完整处理流程]
语音输入 → 语音识别 → 大模型理解 → 语义框架填充 → 上下文验证 → 意图输出
图3:多机器人任务分配算法流程图
[图示任务分解、机器人选择、任务分配的完整流程]
任务输入 → 原子操作分解 → 机器人能力匹配 → 负载均衡计算 → 任务分配 → 执行监控
图4:动态重规划机制示意图
[图示环境变化检测、任务重规划、执行调整的过程]
环境监控 → 变化检测 → 影响评估 → 重规划触发 → 任务调整 → 继续执行
五、具体实施方式
5.1 硬件实施方式
5.1.1 感知层硬件配置
分布式感知模块采用以下硬件配置:
- 固定位置高清摄像头:5-8个,覆盖主要生活区域
- USB音视频采集设备:与摄像头对应,支持同步音视频采集
- 高质量USB延长线:保证信号传输质量
- 多口USB集线器:带独立供电,支持多设备连接
5.1.2 中央决策层硬件
中央决策模块采用高性能计算设备:
- GPU服务器:配备至少16GB显存,用于大模型推理
- 多核CPU:处理视频流分析和任务规划
- 大容量内存:32GB以上,支持多任务并发
- 高速存储:SSD硬盘,快速加载模型和数据
5.1.3 机器人执行层
多机器人执行模块包含不同类型机器人:
- 移动基座机器人:具备导航和基本运输能力
- 机械臂机器人:具备精细操作能力
- 专用功能机器人:如清洁机器人、配送机器人
5.2 软件实施方式
5.2.1 核心算法实现
意图理解算法
python
1class PatentIntentUnderstanding: 2 def __init__(self, model_config): 3 """ 4 专利保护的意图理解算法实现 5 """ 6 self.llm_model = load_llm_model(model_config) 7 self.context_manager = ContextManager() 8 self.dialogue_history = DialogueHistory() 9 10 def parse_natural_language(self, text_input, environment_context): 11 """ 12 专利特征:基于大模型的自然语言理解方法 13 """ 14 # 构建增强提示词 15 prompt = self._build_enhanced_prompt(text_input, environment_context) 16 17 # 大模型推理 18 raw_response = self.llm_model.generate(prompt) 19 20 # 结构化输出解析 21 structured_intent = self._parse_structured_output(raw_response) 22 23 # 上下文一致性验证 24 validated_intent = self._validate_with_context(structured_intent) 25 26 return validated_intent 27 28 def _build_enhanced_prompt(self, text_input, context): 29 """ 30 专利特征:多模态上下文增强的提示词构建方法 31 """ 32 base_prompt = f""" 33 作为家庭机器人控制系统,请理解以下指令: 34 指令:{text_input} 35 36 环境状态: 37 - 时间:{context['time']} 38 - 人物位置:{context['person_locations']} 39 - 物体状态:{context['object_states']} 40 - 机器人状态:{context['robot_status']} 41 42 请输出结构化JSON... 43 """ 44 return base_prompt 45
多机器人协同调度算法
python
1class PatentMultiRobotScheduler: 2 def __init__(self, robot_fleet): 3 """ 4 专利保护的多机器人协同调度算法 5 """ 6 self.robots = robot_fleet 7 self.task_queue = PriorityTaskQueue() 8 self.collaboration_planner = CollaborationPlanner() 9 10 def optimal_task_assignment(self, task_plan, current_state): 11 """ 12 专利特征:基于多目标优化的任务分配方法 13 """ 14 # 任务-机器人匹配度计算 15 compatibility_scores = self._calculate_compatibility_scores(task_plan) 16 17 # 负载均衡考虑 18 load_factors = self._calculate_load_factors() 19 20 # 协作效益评估 21 collaboration_benefits = self._evaluate_collaboration_benefits(task_plan) 22 23 # 多目标优化求解 24 assignment = self._multi_objective_optimization( 25 compatibility_scores, 26 load_factors, 27 collaboration_benefits 28 ) 29 30 return assignment 31 32 def dynamic_reallocation(self, failed_tasks, changed_conditions): 33 """ 34 专利特征:动态任务重分配机制 35 """ 36 # 影响范围分析 37 impact_scope = self._analyze_impact_scope(failed_tasks) 38 39 # 替代方案生成 40 alternative_plans = self._generate_alternatives(failed_tasks, changed_conditions) 41 42 # 最小代价选择 43 best_alternative = self._select_minimal_cost_alternative(alternative_plans) 44 45 return best_alternative 46
5.2.2 系统集成方法
世界模型统一管理
python
1class PatentWorldModel: 2 def __init__(self): 3 """ 4 专利保护的世界模型统一管理方法 5 """ 6 self.spatial_map = SpatialMap() 7 self.object_registry = ObjectRegistry() 8 self.relationship_graph = RelationshipGraph() 9 10 def multi_source_fusion(self, sensor_data): 11 """ 12 专利特征:多源感知数据融合方法 13 """ 14 # 时空对齐 15 aligned_data = self._spatiotemporal_alignment(sensor_data) 16 17 # 冲突解决 18 resolved_data = self._resolve_conflicts(aligned_data) 19 20 # 状态更新 21 updated_world = self._update_world_state(resolved_data) 22 23 return updated_world 24 25 def predictive_modeling(self, current_state, historical_patterns): 26 """ 27 专利特征:基于历史模式的预测建模 28 """ 29 # 行为模式识别 30 patterns = self._identify_behavior_patterns(historical_patterns) 31 32 # 状态预测 33 predictions = self._predict_future_states(current_state, patterns) 34 35 # 不确定性量化 36 confidence_scores = self._quantify_uncertainty(predictions) 37 38 return predictions, confidence_scores 39
5.3 典型应用场景
场景1:复杂物品递送
用户指令:“把书房桌子上的那本厚书和卧室的眼镜一起拿到客厅给我”
系统执行:
- 理解意图:识别三个位置(书房、卧室、客厅)和两个物体(书、眼镜)
- 任务分解:导航到书房→取书→导航到卧室→取眼镜→导航到客厅→递送
- 机器人分配:根据位置和负载分配最优机器人执行
- 动态调整:如发现用户移动到厨房,自动调整递送目标
场景2:多机器人协作
用户指令:“把这个重箱子和那些书一起搬到书房”
系统执行:
- 识别协作需求:箱子较重需要多个机器人协作
- 角色分配:一个机器人负责稳定箱子,另一个负责推动
- 同步协调:确保两个机器人动作同步
- 安全监控:实时监控协作过程,防止意外
六、权利要求书
独立权利要求
一种基于中央决策的多机器人协同家居服务系统,其特征在于包括:
分布式感知模块,由多个固定位置的音视频采集设备组成,用于采集全屋环境信息;
中央决策模块,包括意图理解单元、任务规划单元和多机器人调度单元;
多机器人执行模块,由多个具备不同功能的服务机器人组成;
通信协调模块,用于各模块间的数据交换和状态同步;
世界模型管理模块,用于维护统一的环境状态和对象关系;
其中,所述意图理解单元采用大型语言模型实现自然语言指令的理解。
一种基于中央决策的多机器人协同家居服务方法,其特征在于包括以下步骤:
通过分布式感知模块采集全屋环境音视频信息;
通过中央决策模块中的意图理解单元解析用户自然语言指令;
通过任务规划单元将用户意图分解为可执行的原子操作序列;
通过多机器人调度单元将原子操作分配给合适的服务机器人;
通过多机器人执行模块协同完成用户指令对应的任务;
通过世界模型管理模块实时更新环境状态并支持动态重规划。
从属权利要求
根据权利要求1所述的系统,其特征在于:所述意图理解单元支持上下文记忆、多轮对话和意图澄清。
根据权利要求1所述的系统,其特征在于:所述多机器人调度单元基于机器人能力匹配、负载均衡和协作效益进行任务分配。
根据权利要求1所述的系统,其特征在于:所述世界模型管理模块实现多源感知数据融合和动态环境预测。
根据权利要求2所述的方法,其特征在于:所述解析用户自然语言指令的步骤包括基于大模型的语义理解和结构化输出。
根据权利要求2所述的方法,其特征在于:所述任务分配的步骤包括多目标优化算法和动态重分配机制。
根据权利要求2所述的方法,其特征在于还包括:实时监控任务执行状态,当检测到环境变化或执行异常时触发动态重规划。
七、专利说明书摘要
本发明公开了一种基于中央决策的多机器人协同家居服务系统及方法。该系统采用"集中感知、集中决策、分散执行"的架构,通过分布式感知模块采集全屋环境信息,利用大型语言模型实现自然语言指令的深度理解,基于统一的世界模型进行任务规划和多机器人协同调度,支持动态重规划和异常处理。本发明解决了现有家用机器人系统理解能力有限、协同效率低下、适应性差等技术问题,实现了真正智能化的多机器人家居服务。
八、技术优势与创新点总结
8.1 技术创新点
架构创新:提出"集中感知、集中决策、分散执行"的新型机器人系统架构
算法创新:将大型语言模型与机器人任务规划深度结合,实现真正的自然语言理解
机制创新:设计多机器人协同调度和动态重规划机制,提高系统鲁棒性
模型创新:建立统一的世界模型管理方法,实现多源信息融合和环境预测
8.2 技术竞争优势
本发明意图理解:固定词汇识别 自然语言理解 系统架构 分布式决策 集中决策+分散执行 协同能力 有限协同 智能协同调度 适应性 静态规划 动态重规划 扩展性 有限扩展 弹性扩展
《基于中央决策的多机器人协同家居服务系统及方法 - 专利技术文档》 是转载文章,点击查看原文。

